kgripper_test.c File Reference
This is an application that demonstrates the various Gripper commands. More...
Go to the source code of this file.
Defines | |
| #define | MAXBUFFERSIZE 100 |
Functions | |
| int | initGripper (void) |
| int | revisionOS (int argc, char *argv[], void *data) |
| int | status (int argc, char *argv[], void *data) |
| int | movearm (int argc, char *argv[], void *data) |
| int | movegrip (int argc, char *argv[], void *data) |
| int | get (int argc, char *argv[], void *data) |
| int | grip (int argc, char *argv[], void *data) |
| int | demo (int argc, char *argv[], void *data) |
| int | sensor (int argc, char *argv[], void *data) |
| int | setTorque (int argc, char *argv[], void *data) |
| int | setMaxSpeed (int argc, char *argv[], void *data) |
| int | searchLimit (int argc, char *argv[], void *data) |
| int | quit (int argc, char *argv[], void *data) |
| int | help (int argc, char *argv[], void *data) |
| int | main (int arc, char *argv[]) |
Variables | |
| static int | quitReq = 0 |
| static char | buf [1024] |
| static knet_dev_t * | Arm |
| static knet_dev_t * | Gripper |
| static kb_command_t | cmds [] |
Detailed Description
This is an application that demonstrates the various Gripper commands.Khepera3 Gripper test application
- Note:
- Copyright (C) 2010 K-TEAM SA
- Bug:
- none discovered.
- Todo:
- nothing.
Definition in file kgripper_test.c.
Define Documentation
| #define MAXBUFFERSIZE 100 |
Definition at line 17 of file kgripper_test.c.
Referenced by ambIR(), braitenbergAvoidance(), configureOS(), main(), measureUS(), proxIR(), revisionOS(), tstampRST(), and voltageBAT().
Function Documentation
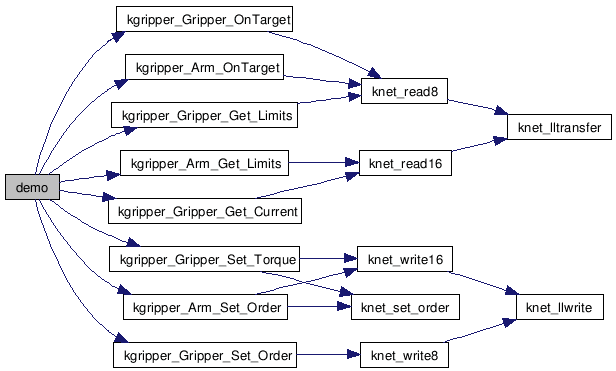
| int demo | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
demo function will move the gripper n times (0 = infiny) using kb_gripper.c library.
Definition at line 251 of file kgripper_test.c.
References kgripper_Arm_Get_Limits(), kgripper_Arm_OnTarget(), kgripper_Arm_Set_Order(), kgripper_Gripper_Get_Current(), kgripper_Gripper_Get_Limits(), kgripper_Gripper_OnTarget(), kgripper_Gripper_Set_Order(), and kgripper_Gripper_Set_Torque().
| int get | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
get function will move the gripper to get an object (=1) or release it (= 0) using kb_gripper.c library.
Definition at line 167 of file kgripper_test.c.
References kgripper_Arm_Get_Limits(), kgripper_Arm_OnTarget(), kgripper_Arm_Set_Order(), kgripper_Gripper_Get_Current(), kgripper_Gripper_Get_Limits(), kgripper_Gripper_Get_Resistivity(), kgripper_Gripper_Object_Detected(), kgripper_Gripper_OnTarget(), kgripper_Gripper_Set_Order(), and kgripper_Gripper_Set_Torque().

| int grip | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
grip function will move the gripper n times (0 = infiny) using kb_gripper.c library.
Definition at line 216 of file kgripper_test.c.
References kgripper_Gripper_Get_Current(), kgripper_Gripper_Get_Limits(), kgripper_Gripper_Get_Torque(), kgripper_Gripper_OnTarget(), and kgripper_Gripper_Set_Order().

| int help | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Display a list of available commands.
Definition at line 453 of file koala_GoAutomation.c.
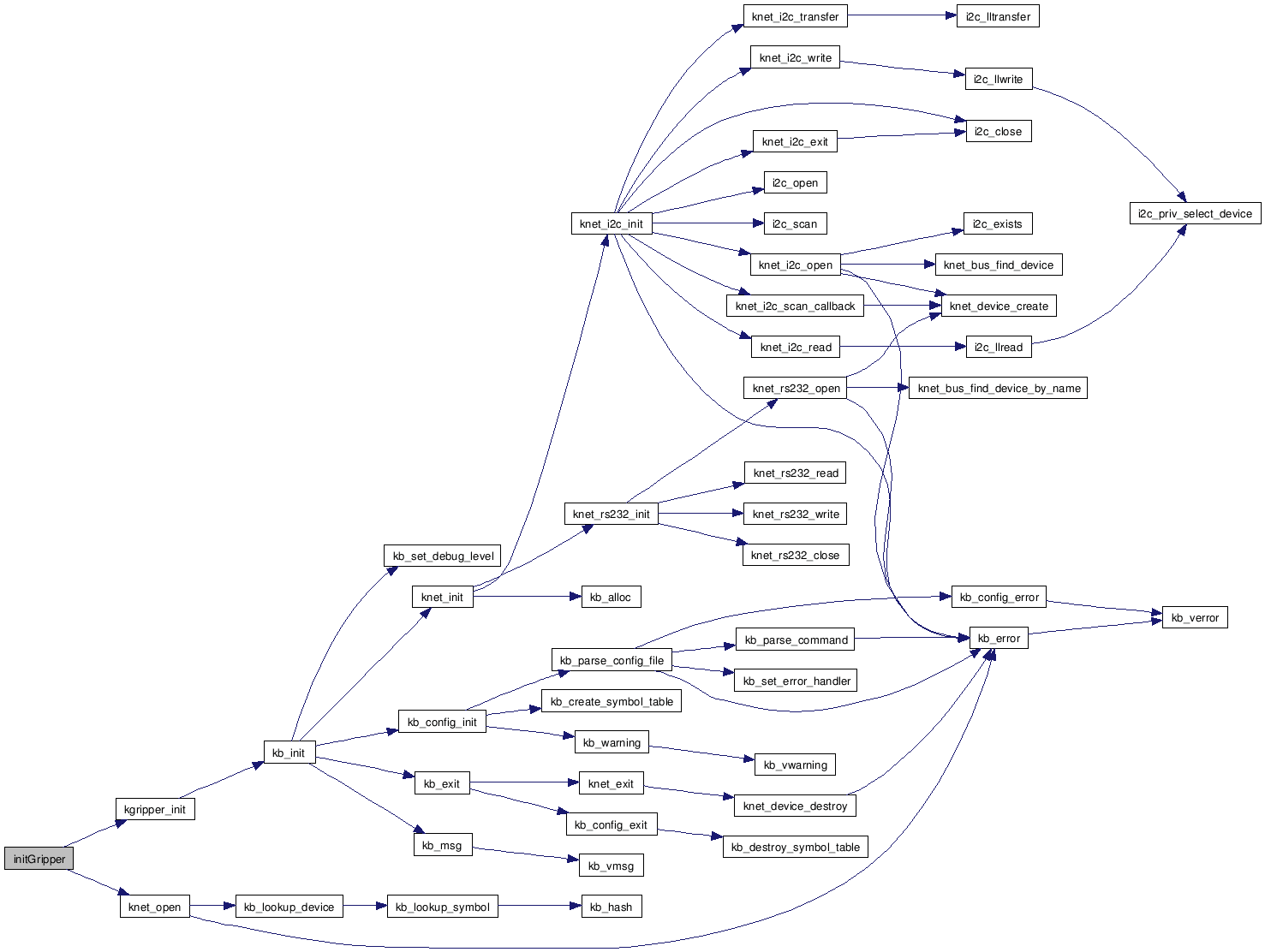
| int initGripper | ( | void | ) |
initGripper open the various required handle to the both i2c devices on the Gripper using knet_open from the knet.c libkorebot's modules.
- Returns:
- A value :
- 1 if success
- 0 if any error
Definition at line 40 of file kgripper_test.c.
References kgripper_init(), KNET_BUS_I2C, and knet_open().
Referenced by main().
| int main | ( | int | arc, | |
| char * | argv[] | |||
| ) |
Definition at line 417 of file kgripper_test.c.
References buf, initGripper(), kb_parse_command(), MAXBUFFERSIZE, and quitReq.

| int movearm | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
movearm function set a new position order for the Arm of the Gripper using kb_gripper.c library.
Definition at line 144 of file kgripper_test.c.
References kgripper_Arm_Set_Order().

| int movegrip | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
movegrip function set a new position order for the Finger of the Gripper using kb_gripper.c library.
Definition at line 155 of file kgripper_test.c.
References kgripper_Gripper_Set_Order().

| int quit | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
| int revisionOS | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
revisionOS retrieves the Gripper os version using kb_gripper.c library.
Definition at line 67 of file kgripper_test.c.
References kgripper_Arm_Get_Version(), and kgripper_Gripper_Get_Version().

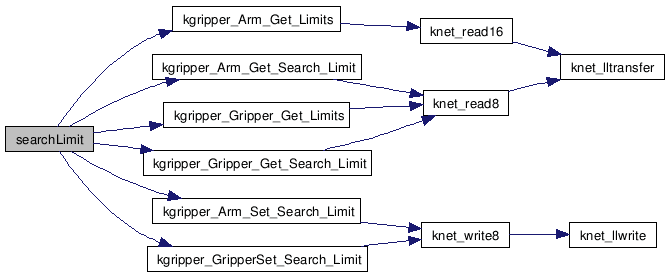
| int searchLimit | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
searchLimit start the mechanical limit search using kb_gripper.c library.
Definition at line 353 of file kgripper_test.c.
References kgripper_Arm_Get_Limits(), kgripper_Arm_Get_Search_Limit(), kgripper_Arm_Set_Search_Limit(), kgripper_Gripper_Get_Limits(), kgripper_Gripper_Get_Search_Limit(), and kgripper_GripperSet_Search_Limit().
| int sensor | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
sensor return all the value of the sensors in the Gripper finger using kb_gripper.c library.
Definition at line 303 of file kgripper_test.c.
References kgripper_Gripper_Get_Ambiant_IR_Light(), kgripper_Gripper_Get_Distance_Sensors(), kgripper_Gripper_Get_Resistivity(), and kgripper_Gripper_Object_Detected().

| int setMaxSpeed | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
setMaxSpeed define the maximal speed of the arm gripper using kb_gripper.c library.
Definition at line 343 of file kgripper_test.c.
References kgripper_Arm_Set_Max_Speed().

| int setTorque | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
setTorque define the maximal Torque use by the finger to grip an object using kb_gripper.c library.
Definition at line 333 of file kgripper_test.c.
References kgripper_Gripper_Set_Torque().

| int status | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
status return all the value of the Gripper using kb_gripper.c library.
Definition at line 87 of file kgripper_test.c.
References kgripper_Arm_Get_Capacity(), kgripper_Arm_Get_Current(), kgripper_Arm_Get_Limits(), kgripper_Arm_Get_Max_Speed(), kgripper_Arm_Get_Order(), kgripper_Arm_Get_Position(), kgripper_Arm_Get_Speed(), kgripper_Arm_Get_Voltage(), kgripper_Arm_OnTarget(), kgripper_Gripper_Get_Current(), kgripper_Gripper_Get_Limits(), kgripper_Gripper_Get_Order(), kgripper_Gripper_Get_Position(), kgripper_Gripper_Get_Speed(), kgripper_Gripper_Get_Torque(), and kgripper_Gripper_OnTarget().
Referenced by canled(), kmot_ipStatus(), main(), status(), and test().

Variable Documentation
knet_dev_t* Arm [static] |
handle to the various Gripper devices (knet socket, i2c mode)
Definition at line 25 of file kgripper_test.c.
char buf[1024] [static] |
Definition at line 20 of file kgripper_test.c.
kb_command_t cmds[] [static] |
Initial value:
{
{ "quit" , 0 , 0 , quit } ,
{ "exit" , 0 , 0 , quit } ,
{ "status" , 1 , 1 , status },
{ "getrev" , 0 , 0 , revisionOS },
{ "movearm" , 1 , 1 , movearm } ,
{ "movegrip" , 1 , 1 , movegrip } ,
{ "sensor" , 1 , 1 , sensor } ,
{ "maxspeed" , 1 , 1 , setMaxSpeed } ,
{ "get" , 1 , 1 , get } ,
{ "demo" , 1 , 1 , demo } ,
{ "grip" , 1 , 1 , grip } ,
{ "torque" , 1 , 1 , setTorque } ,
{ "search" , 0 , 0 , searchLimit },
{ "help" , 0 , 0 , help } ,
{ NULL , 0 , 0 , NULL }
}
Definition at line 385 of file kgripper_test.c.
knet_dev_t* Gripper [static] |
Definition at line 26 of file kgripper_test.c.
int quitReq = 0 [static] |
Definition at line 19 of file kgripper_test.c.
