khepera3_test_loop.c File Reference
Go to the source code of this file.
Defines | |
| #define | MAXBUFFERSIZE 100 |
| #define | BR_IRGAIN 20 |
| #define | fwSpeed 60 |
| #define | MAXBUFFERSIZE 256 |
Functions | |
| int | initMot (knet_dev_t *hDev) |
| int | initKH3 (void) |
| int | proxIR (int argc, char *argv[], void *data) |
| int | ambIR (int argc, char *argv[], void *data) |
| int | voltageBAT (int argc, char *argv[], void *data) |
| int | tstampRST (int argc, char *argv[], void *data) |
| int | revisionOS (int argc, char *argv[], void *data) |
| int | configureOS (int argc, char *argv[], void *data) |
| int | measureUS (int argc, char *argv[], void *data) |
| int | motSpeed (int argc, char *argv[], void *data) |
| int | motMove (int argc, char *argv[], void *data) |
| int | motStop (int argc, char *argv[], void *data) |
| int | braitenbergAvoidance (int argc, char *argv[], void *data) |
| int | quit (int argc, char *argv[], void *data) |
| int | help (int argc, char *argv[], void *data) |
| int | main (int arc, char *argv[]) |
Variables | |
| static int | quitReq = 0 |
| static char | buf [1024] |
| static knet_dev_t * | dsPic |
| static knet_dev_t * | mot1 |
| static knet_dev_t * | mot2 |
| static kb_command_t | cmds [] |
Define Documentation
| #define BR_IRGAIN 20 |
| #define fwSpeed 60 |
Definition at line 372 of file khepera3_test_loop.c.
| #define MAXBUFFERSIZE 256 |
Definition at line 513 of file khepera3_test_loop.c.
| #define MAXBUFFERSIZE 100 |
Definition at line 513 of file khepera3_test_loop.c.
Function Documentation
| int ambIR | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
ambIR retrieves ambiant ir measure using kb_khepera3.c library.
Definition at line 129 of file khepera3_test_loop.c.
References kh3_ambiant_ir(), and MAXBUFFERSIZE.

| int braitenbergAvoidance | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Definition at line 374 of file khepera3_test_loop.c.
References BR_IRGAIN, fwSpeed, kb_gpio_get(), kh3_sendcommand(), kmot_GetMeasure(), kmot_SetPoint(), kMotMesSpeed, kMotRegSpeed, KNET_INT0, knet_llread(), and MAXBUFFERSIZE.

| int configureOS | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
configureOS configures various parameters inside the kh3 firmware using kb_khepera3.c library.
- Parameters:
-
1st first param (argv[1]) is the index pointing in configuration array. 2nd the second param (argv[2]) is the value to store where the index point at.
Definition at line 243 of file khepera3_test_loop.c.
References kh3_configure_os(), and MAXBUFFERSIZE.

| int help | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Display a list of available commands.
Definition at line 453 of file koala_GoAutomation.c.
| int initKH3 | ( | void | ) |
initKH3 initialize various things in the kh3 then sequentialy open the various required handle to the three i2c devices on the khepera3 using knet_open from the knet.c libkorebot's modules. Finaly, this function initializes then configures the motor control unit.
- Returns:
- A value :
- 1 if success
- 0 if any error
Definition at line 81 of file khepera3_test_loop.c.
References initMot(), kh3_init(), KNET_BUS_I2C, and knet_open().
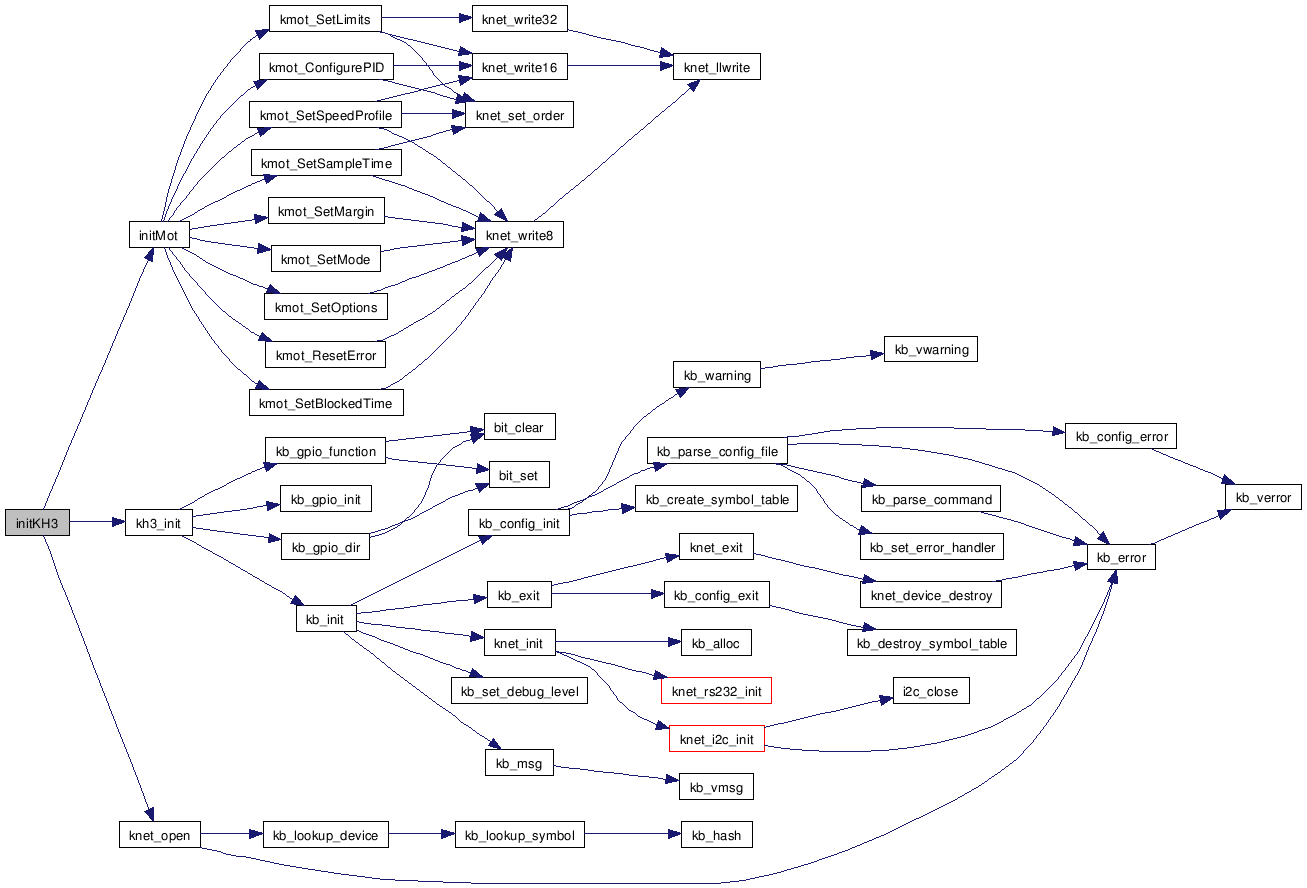
| int initMot | ( | knet_dev_t * | hDev | ) |
initMot initializes then configures the motor control unit.
- Returns:
- A value :
- 1 if success
- 0 if any error
Definition at line 39 of file khepera3_test_loop.c.
References kmot_ConfigurePID(), kmot_ResetError(), kmot_SetBlockedTime(), kmot_SetLimits(), kmot_SetMargin(), kmot_SetMode(), kmot_SetOptions(), kmot_SetSampleTime(), kmot_SetSpeedProfile(), kMotModeIdle, kMotRegCurrent, kMotRegPos, kMotRegSpeed, kMotSWOptDirectionInv, kMotSWOptStopMotorBlk, and kMotSWOptWindup.

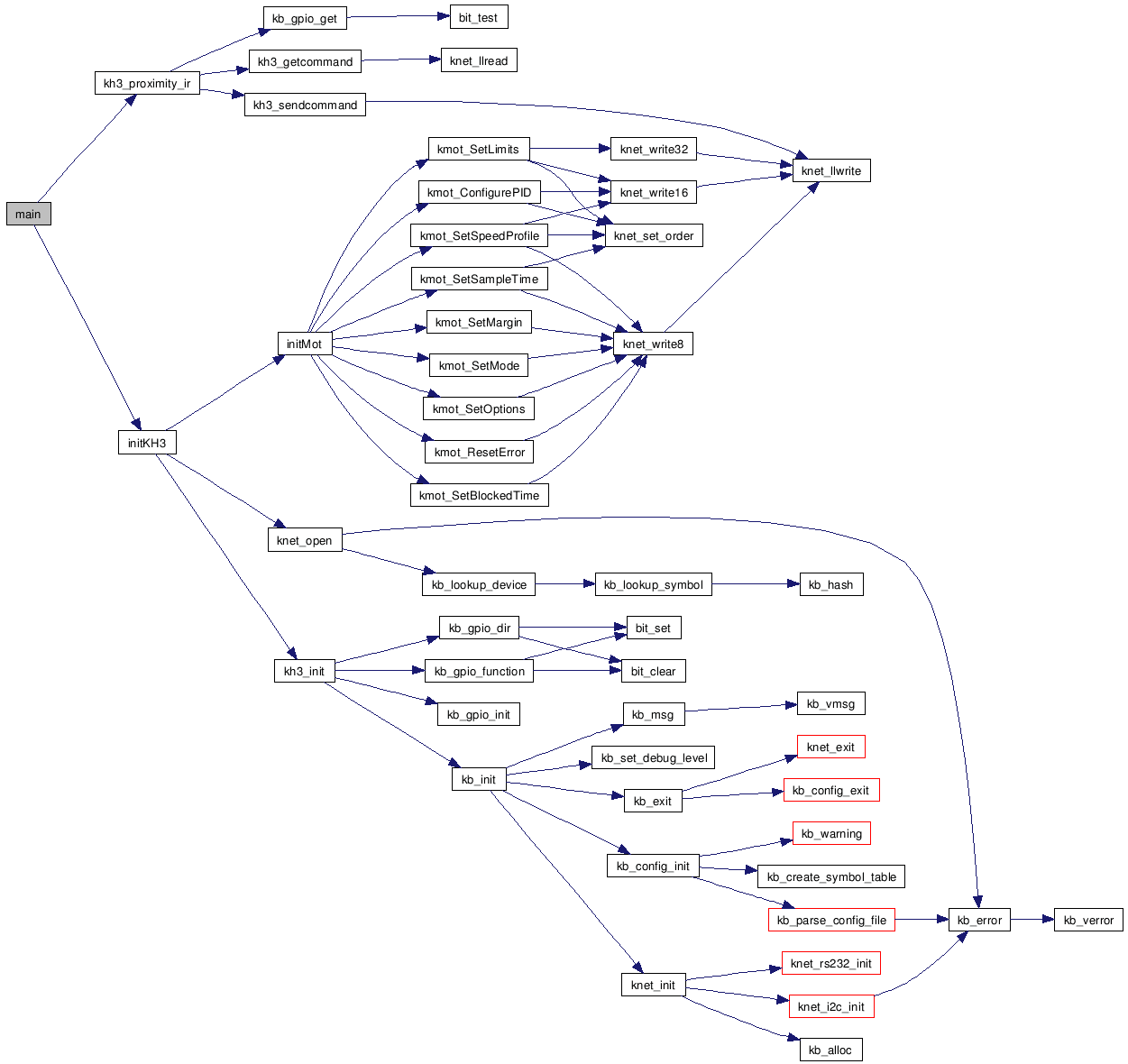
| int main | ( | int | arc, | |
| char * | argv[] | |||
| ) |
Definition at line 516 of file khepera3_test_loop.c.
References initKH3(), kh3_proximity_ir(), MAXBUFFERSIZE, and quitReq.
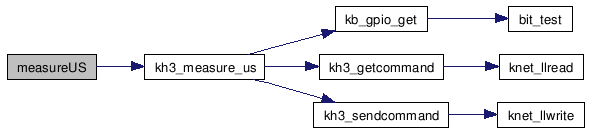
| int measureUS | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
measureUS retrieves ultrasonic measure from a given transceiver.
- Parameters:
-
1st first param (argv[1]) is the us number to read from (1 to 5).
Definition at line 266 of file khepera3_test_loop.c.
References kh3_measure_us(), and MAXBUFFERSIZE.
| int motMove | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
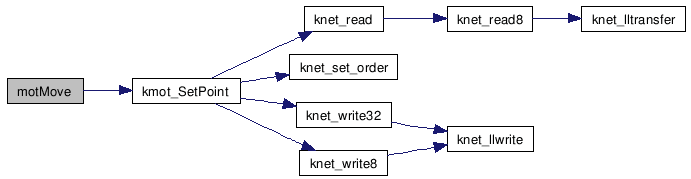
motMove configures the motor controller position in the engine control unit.
- Parameters:
-
1st first param (argv[1]) is the motor1 position. 2nd second param (argv[2]) is the motor2 position.
Definition at line 336 of file khepera3_test_loop.c.
References kmot_SetPoint(), and kMotRegPos.
| int motSpeed | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
motSpeed configures the motor controller speed in the engine control unit.
- Parameters:
-
1st first param (argv[1]) is the motor1 speed. 2nd second param (argv[2]) is the motor2 speed.
Definition at line 317 of file khepera3_test_loop.c.
References kmot_SetPoint(), and kMotRegSpeed.

| int motStop | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
motStop stops the motor in the engine control unit.
- Parameters:
-
none.
Definition at line 353 of file khepera3_test_loop.c.
References kmot_SetMode(), and kMotModeStopMotor.

| int proxIR | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
proxIR retrieves proximity ir measure using kb_khepera3.c library.
Definition at line 111 of file khepera3_test_loop.c.
References kh3_proximity_ir(), and MAXBUFFERSIZE.

| int quit | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
| int revisionOS | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
revisionOS retrieves the khepera3 os version using kb_khepera3.c library.
Definition at line 223 of file khepera3_test_loop.c.
References kh3_revision(), and MAXBUFFERSIZE.

| int tstampRST | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
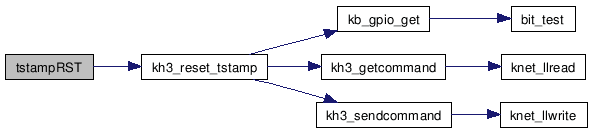
tstampRST resets the relative time stamp using kb_khepera3.c library.
Definition at line 210 of file khepera3_test_loop.c.
References kh3_reset_tstamp(), and MAXBUFFERSIZE.
| int voltageBAT | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
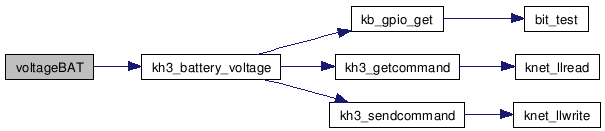
voltageBAT retrieves the battery voltage using kb_khepera3.c library.
Definition at line 147 of file khepera3_test_loop.c.
References kh3_battery_voltage(), and MAXBUFFERSIZE.
Variable Documentation
char buf[1024] [static] |
Definition at line 20 of file khepera3_test_loop.c.
kb_command_t cmds[] [static] |
Initial value:
{
{ "quit" , 0 , 0 , quit } ,
{ "exit" , 0 , 0 , quit } ,
{ "bye" , 0 , 0 , quit } ,
{ "setcfg" , 2 , 2 , configureOS },
{ "getrev" , 0 , 0 , revisionOS },
{ "getbat" , 1 , 1 , voltageBAT },
{ "rststamp" , 0 , 0 , tstampRST },
{ "getambir" , 0 , 0 , ambIR },
{ "getproxir" , 0 , 0 , proxIR },
{ "getus" , 1 , 1 , measureUS },
{ "setmotspeed" , 2 , 2 , motSpeed },
{ "setmotmove" , 2 , 2 , motMove },
{ "motstop" , 0 , 0 , motStop },
{ "braiten" , 0 , 0 , braitenbergAvoidance},
{ "help" , 0 , 0 , help } ,
{ NULL , 0 , 0 , NULL }
}
Definition at line 480 of file khepera3_test_loop.c.
knet_dev_t* dsPic [static] |
handle to the various khepera3 devices (knet socket, i2c mode)
Definition at line 25 of file khepera3_test_loop.c.
knet_dev_t* mot1 [static] |
Definition at line 26 of file khepera3_test_loop.c.
knet_dev_t* mot2 [static] |
Definition at line 27 of file khepera3_test_loop.c.
int quitReq = 0 [static] |
Definition at line 19 of file khepera3_test_loop.c.
