koreio_robot.c File Reference

Go to the source code of this file.
Defines | |
| #define | id 0x00000400 |
| #define | null 0x1E7F4000 |
| #define | one 0x1E7F7900 |
| #define | two 0x1E7F2400 |
| #define | three 0x1E7F3000 |
| #define | four 0x1E7F1900 |
| #define | five 0x1E7F1200 |
| #define | six 0x1E7F0200 |
| #define | seven 0x1E7F7800 |
| #define | eight 0x1E7F0000 |
| #define | nine 0x1E7F1000 |
| #define | can_status 0x02 |
| #define | id_led 0x00000300 |
| #define | can_data1 0x1E |
Functions | |
| static void | ctrlc_handler (int sig) |
| int | quit (int argc, char *argv[], void *data) |
| int | readios (int argc, char *argv[], void *data) |
| int | configio (int argc, char *argv[], void *data) |
| int | resetio (int argc, char *argv[], void *data) |
| int | changeled (int argc, char *argv[], void *data) |
| int | changeio (int argc, char *argv[], void *data) |
| int | setio (int argc, char *argv[], void *data) |
| int | readad (int argc, char *argv[], void *data) |
| int | readcan (int argc, char *argv[], void *data) |
| int | can7seg (int argc, char *argv[], void *data) |
| int | canled (int argc, char *argv[], void *data) |
| int | setad (int argc, char *argv[], void *data) |
| int | setratio (int argc, char *argv[], void *data) |
| int | motor (int argc, char *argv[], void *data) |
| int | gripper (int argc, char *argv[], void *data) |
| int | setfreq (int argc, char *argv[], void *data) |
| int | readio (int argc, char *argv[], void *data) |
| int | changepw (int argc, char *argv[], void *data) |
| int | setpw (int argc, char *argv[], void *data) |
| int | readi2c (int argc, char *argv[], void *data) |
| int | writei2c (int argc, char *argv[], void *data) |
| int | startscan (int argc, char *argv[], void *data) |
| int | listscan (int argc, char *argv[], void *data) |
| int | resetpw (int argc, char *argv[], void *data) |
| int | timer (int argc, char *argv[], void *data) |
| int | sequence (int argc, char *argv[], void *data) |
| int | help (int argc, char *argv[], void *data) |
| int | main (int argc, char *argv[]) |
Variables | |
| static int | quitReq = 0 |
| static knet_dev_t * | koreio |
| static kb_command_t | cmds [] |
| static char | buf [1024] |
Define Documentation
| #define can_data1 0x1E |
| #define can_status 0x02 |
| #define eight 0x1E7F0000 |
| #define five 0x1E7F1200 |
| #define four 0x1E7F1900 |
| #define id 0x00000400 |
| #define id_led 0x00000300 |
| #define nine 0x1E7F1000 |
| #define null 0x1E7F4000 |
| #define one 0x1E7F7900 |
| #define seven 0x1E7F7800 |
| #define six 0x1E7F0200 |
| #define three 0x1E7F3000 |
| #define two 0x1E7F2400 |
Function Documentation
| int can7seg | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Write on the CAN bus and change the 7 seg value (work only with the CAN developement kit)
Definition at line 186 of file koreio_robot.c.
References can_status, eight, five, four, kio_SendCAN(), nine, null, one, seven, six, three, and two.

| int canled | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Change the state of the three led on the CAN developpement kit
Definition at line 250 of file koreio_robot.c.
References can_data1, can_status, id_led, kio_SendCAN(), and status().

| int changeio | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Change the given digital output value
Definition at line 115 of file koreio_robot.c.
References kio_ChangeIO().

| int changeled | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Change the LED state
Definition at line 100 of file koreio_robot.c.
References kio_ChangeLed().

| int changepw | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Change the given power output value
Definition at line 386 of file koreio_robot.c.
References kio_ChangePW().

| int configio | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Configure the given digital IO The first argument is the IO number The second argument is: 0 to set as input 1 to set as ouput 2 to set as pwm
Definition at line 66 of file koreio_robot.c.
References kio_ConfigIO().

| static void ctrlc_handler | ( | int | sig | ) | [static] |
Make sure the program terminate properly on a ctrl-c
Definition at line 35 of file koreio_robot.c.
References quitReq.
| int gripper | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Set the PWM ratio for the motor
Definition at line 335 of file koreio_robot.c.
References kio_ChangePWM_ratio().

| int help | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Display a list of available commands.
Definition at line 453 of file koala_GoAutomation.c.
| int listscan | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Definition at line 468 of file koreio_robot.c.
References kio_i2c_ListScan().

| int main | ( | int | argc, | |
| char * | argv[] | |||
| ) |
Definition at line 717 of file koreio_robot.c.
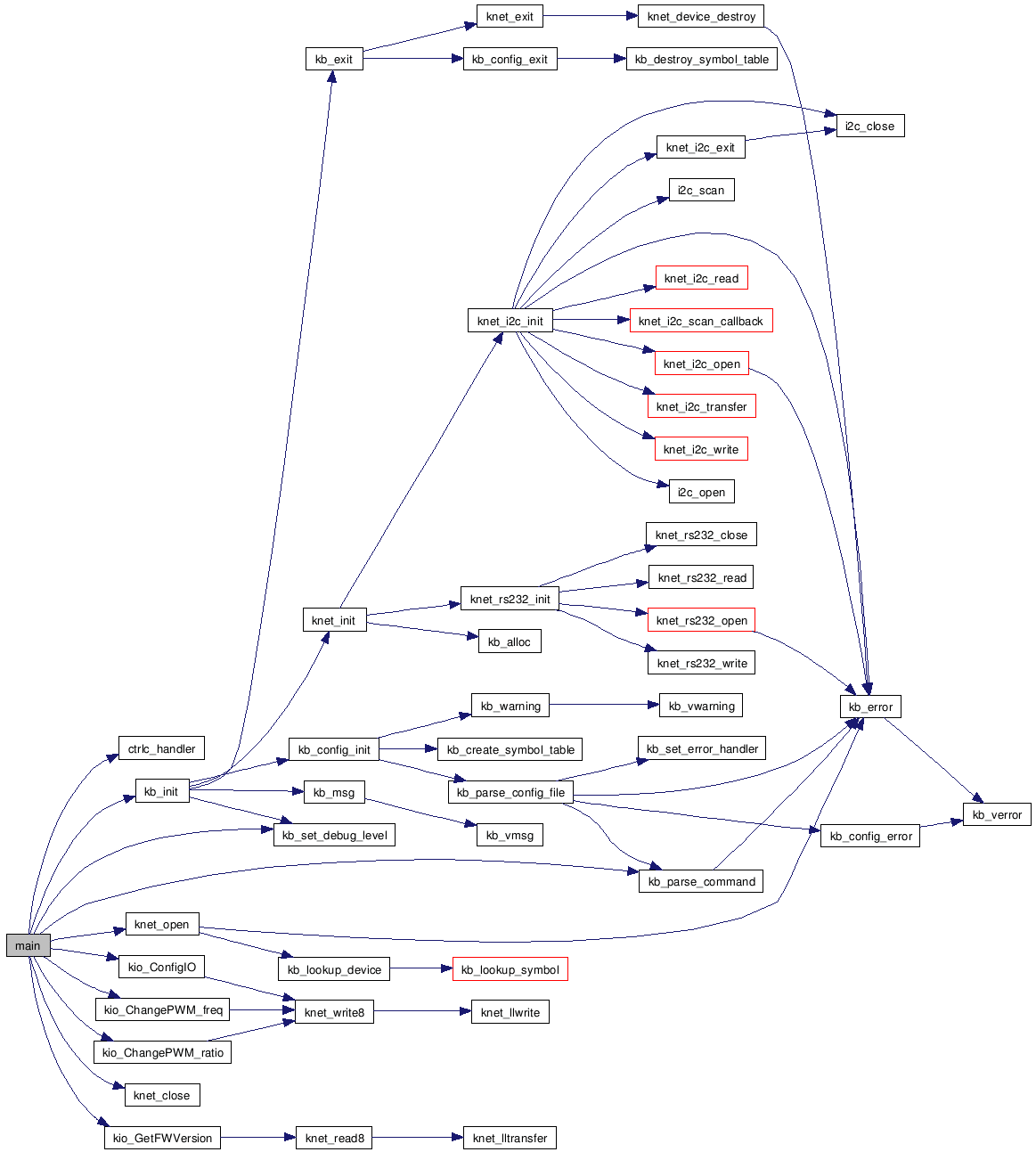
References ctrlc_handler(), kb_init(), kb_parse_command(), kb_set_debug_level(), kio_ChangePWM_freq(), kio_ChangePWM_ratio(), kio_ConfigIO(), kio_GetFWVersion(), KNET_BUS_ANY, knet_close(), knet_open(), and quitReq.
| int motor | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Set the PWM ratio for the motor
Definition at line 311 of file koreio_robot.c.
References kio_ChangePWM_ratio().

| int quit | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
| int readad | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Read the given analog input value
Definition at line 145 of file koreio_robot.c.
References kio_ReadAnalog().

| int readcan | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Read the can message in the buffer and erase it
Definition at line 163 of file koreio_robot.c.
References can_data1, can_status, id, and kio_ReadCAN().

| int readi2c | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
read on the secondary I2C bus n_times (max 4)
Definition at line 416 of file koreio_robot.c.
References kio_i2c_ReturnRead(), and kio_i2c_StartRead().

| int readio | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Read the given IO state
Definition at line 371 of file koreio_robot.c.
References kio_ReadIO().

| int readios | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Read all the IO states and display them. The first digit displayed is IO0 and the last is IO15. A x is displayed for IOs in output mode and a p is displayed for IOs in pwm mode
Definition at line 53 of file koreio_robot.c.
| int resetio | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Reset the given digital output value
Definition at line 85 of file koreio_robot.c.
References kio_ClearIO().

| int resetpw | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Reset the given power output value
Definition at line 488 of file koreio_robot.c.
References kio_ClearPW().

| int sequence | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Definition at line 520 of file koreio_robot.c.
References kio_ChangePWM_ratio().

| int setad | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Change the given analog output value
Definition at line 278 of file koreio_robot.c.
References kio_SetANValue().

| int setfreq | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Set the PWM channel frequence
Definition at line 356 of file koreio_robot.c.
References kio_ChangePWM_freq().

| int setio | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Set the given digital output value
Definition at line 130 of file koreio_robot.c.
References kio_SetIO().

| int setpw | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Set the given power output value
Definition at line 401 of file koreio_robot.c.
References kio_SetPW().

| int setratio | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Set the PWM channel ratio
Definition at line 296 of file koreio_robot.c.
References kio_ChangePWM_ratio().

| int startscan | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Start an address Scan on the secondary I2C bus. The list of answering devices must be consulted using readlist.
Definition at line 459 of file koreio_robot.c.
References kio_i2c_StartScan().

| int timer | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Handle the Analog measurement timestamp timer Argument 1 is: 0 to reset the timer 1 to stop the timer 2 to launch the timer
Definition at line 507 of file koreio_robot.c.
References kio_Timer().

| int writei2c | ( | int | argc, | |
| char * | argv[], | |||
| void * | data | |||
| ) |
Write on the secondary I2C bus
Definition at line 446 of file koreio_robot.c.
References kio_i2c_Write().

Variable Documentation
char buf[1024] [static] |
Main program to process the command line.
Definition at line 715 of file koreio_robot.c.
kb_command_t cmds[] [static] |
The command table contains: command name : min number of args : max number of args : the function to call
Definition at line 664 of file koreio_robot.c.
knet_dev_t* koreio [static] |
Definition at line 29 of file koreio_robot.c.
int quitReq = 0 [static] |
Definition at line 28 of file koreio_robot.c.
