Include dependency graph for koala_lrf_demo.c:
Go to the source code of this file.
Defines | |
| #define | device "/dev/tts/2" |
| #define | MAX_DIST 2000 |
| #define | RCVBUFSIZE 32 /* Size of receive buffer */ |
Functions | |
| void * | koa_lrf_task (void *arg) |
| void | handle_kill (int arg) |
| int | koa_net_stop (int argc, char *argv[]) |
| int | koa_net_setspeed (int argc, char *argv[]) |
| int | main (int argc, char *argv[]) |
Variables | |
| int | lrf |
| knet_dev_t * | koala |
| int | cmd_received = 0 |
Led Range Finder Demo
Definition in file koala_lrf_demo.c.
|
|
Definition at line 17 of file koala_lrf_demo.c. |
|
|
Definition at line 19 of file koala_lrf_demo.c. Referenced by koa_lrf_task(). |
|
|
Definition at line 20 of file koala_lrf_demo.c. |
|
|
Definition at line 128 of file koala_lrf_demo.c. References kb_lrf_Close(), koa_setSpeed(), koala, and lrf. Here is the call graph for this function:  |
|
|
Definition at line 29 of file koala_lrf_demo.c. References cmd_received, device, kb_lrf_DistanceData, kb_lrf_GetDistances(), kb_lrf_Init(), koa_setSpeed(), koala, left, lrf, MAX_DIST, and right. Referenced by main(). Here is the call graph for this function: 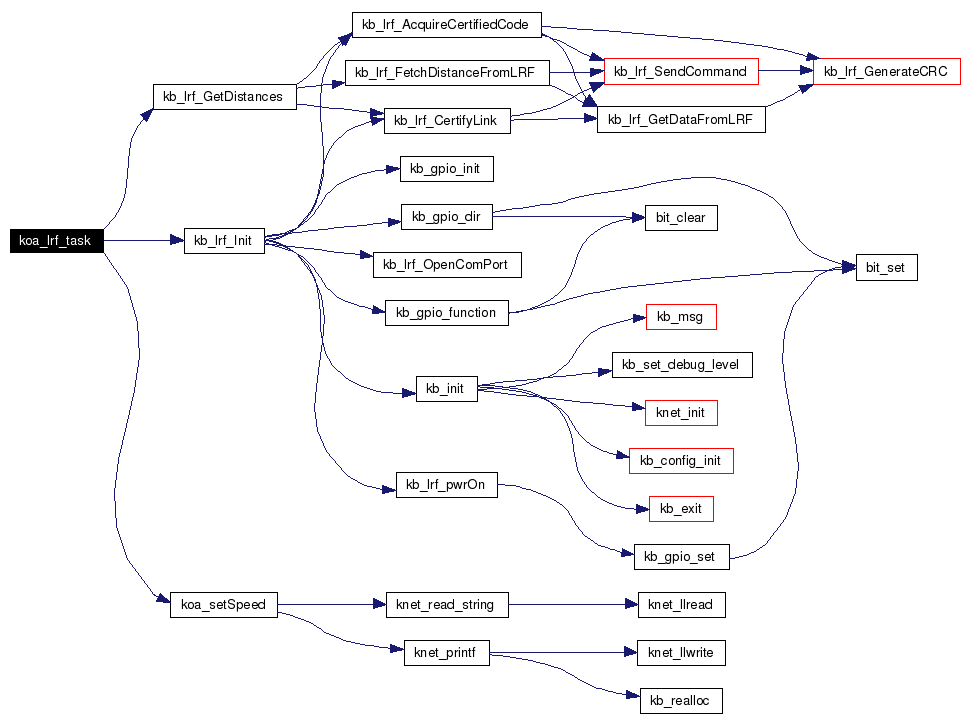 |
|
||||||||||||
|
Definition at line 146 of file koala_lrf_demo.c. References koa_setSpeed(), koala, left, and right. Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 139 of file koala_lrf_demo.c. References koa_setSpeed(), and koala. Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 164 of file koala_lrf_demo.c. References cmd_received, DieWithError(), handle_kill(), kb_init(), kb_set_debug_level(), KNET_BUS_ANY, knet_open(), koa_getOSVersion(), koa_lrf_task(), koa_net_setspeed(), koa_net_stop(), koa_setSpeed(), koala, ksock_add_command(), ksock_exec_command(), ksock_get_command(), ksock_init(), ksock_next_connection(), ksock_server_open(), list_command(), and RCVBUFSIZE. Here is the call graph for this function:  |
|
|
Definition at line 26 of file koala_lrf_demo.c. Referenced by koa_lrf_task(), and main(). |
|
|
Definition at line 24 of file koala_lrf_demo.c. |
|
|
Definition at line 23 of file koala_lrf_demo.c. Referenced by handle_kill(), and koa_lrf_task(). |
 1.3.7
1.3.7