kb_khepera3.h File Reference

Go to the source code of this file.
Defines | |
| #define | KNET_INT0 40 |
| #define | IN 1 |
| #define | OUT 0 |
| #define | KH3_ERROR_SUCCESS 0 |
| #define | KH3_ERROR_KBINIT -1 |
| #define | KH3_ERROR_FRMSZ -2 |
| #define | KH3_ERROR_SZFMT -3 |
| #define | KH3_ERROR_FRMSND -4 |
| #define | K3_CMD_DELAY 300 |
Functions | |
| int | kh3_init (void) |
| int | kh3_getcommand (knet_dev_t *, unsigned char *) |
| int | kh3_sendcommand (knet_dev_t *, unsigned char *) |
| int | kh3_proximity_ir (char *, knet_dev_t *) |
| int | kh3_ambiant_ir (char *, knet_dev_t *) |
| int | kh3_battery_voltage (char *, unsigned char, knet_dev_t *) |
| int | kh3_reset_tstamp (char *, knet_dev_t *) |
| int | kh3_revision (char *, knet_dev_t *) |
| int | kh3_configure_os (char *, unsigned char, unsigned char, knet_dev_t *) |
| int | kh3_measure_us (char *, unsigned char, knet_dev_t *) |
Define Documentation
| #define IN 1 |
| #define K3_CMD_DELAY 300 |
Khepera3 command delay
Definition at line 36 of file kb_khepera3.h.
Referenced by kh3_ambiant_ir(), kh3_battery_voltage(), kh3_configure_os(), kh3_measure_us(), kh3_proximity_ir(), kh3_reset_tstamp(), and kh3_revision().
| #define KH3_ERROR_FRMSND -4 |
| #define KH3_ERROR_FRMSZ -2 |
| #define KH3_ERROR_KBINIT -1 |
| #define KH3_ERROR_SUCCESS 0 |
Khepera3 Error codes
Definition at line 27 of file kb_khepera3.h.
| #define KH3_ERROR_SZFMT -3 |
| #define KNET_INT0 40 |
Khepera3 <-> Korebot gpios pin definitions
Definition at line 19 of file kb_khepera3.h.
Referenced by braitenbergAvoidance(), kh3_ambiant_ir(), kh3_battery_voltage(), kh3_configure_os(), kh3_init(), kh3_measure_us(), kh3_proximity_ir(), kh3_reset_tstamp(), and kh3_revision().
| #define OUT 0 |
Function Documentation
| int kh3_ambiant_ir | ( | char * | outbuf, | |
| knet_dev_t * | hDev | |||
| ) |
kh3_ambiant_ir retrieves an instant IR measure.
- Parameters:
-
outbuf is a buffer where the data will be stored on. hDev is a handle to an openned knet socket (Khepera3:dsPic).
- Returns:
- NULL or a pointer to the IR measure.
Definition at line 190 of file kb_khepera3.c.
References K3_CMD_DELAY, kb_gpio_get(), kh3_getcommand(), kh3_sendcommand(), and KNET_INT0.
Referenced by ambIR().
| int kh3_battery_voltage | ( | char * | outbuf, | |
| unsigned char | argument, | |||
| knet_dev_t * | hDev | |||
| ) |
kh3_battery_Voltage retrieves the actual battery voltage.
- Parameters:
-
outbuf is a buffer where the data will be stored on. hDev is a handle to an openned knet socket (Khepera3:dsPic).
- Returns:
- NULL or a pointer to the battery voltage.
Definition at line 225 of file kb_khepera3.c.
References K3_CMD_DELAY, kb_gpio_get(), kh3_getcommand(), kh3_sendcommand(), and KNET_INT0.
Referenced by voltageBAT().
| int kh3_configure_os | ( | char * | outbuf, | |
| unsigned char | index, | |||
| unsigned char | value, | |||
| knet_dev_t * | hDev | |||
| ) |
kh3_configure configures the current firmware operation mode. a configuration array is used by the khepera3 to decide its mode of operation.
- Parameters:
-
outbuf is a buffer where the data will be stored on. index is the index pointing one of the configuration word in the config array. value is the value to store in the configuration array. hDev is a handle to an openned knet socket (Khepera3:dsPic).
- 0 : Value that tells on which us transciever to work from This is a bit field where bit0 means trx 1 and so on So to work on the two most left transceiver one should Set 0b0000000000000011 => 3. Note: default value is 4 to work from only the front us trx.
- 1 : Value that decide what is the maximum echo number Note: default value is 3.
- 2 : Value that tell how many pulse can be seen without the echo is detected. This is required because the korebot may generate some noise. A received echo means many 40kHz pulse so this is why we can filter noise that way. Note: default value is 5.
- Returns:
- NULL or a pointer to the output
Definition at line 350 of file kb_khepera3.c.
References K3_CMD_DELAY, kb_gpio_get(), kh3_getcommand(), kh3_sendcommand(), and KNET_INT0.
Referenced by configureOS().
| int kh3_getcommand | ( | knet_dev_t * | hDev, | |
| unsigned char * | out | |||
| ) |
kh3_getcommand gets a command frame from a given khepera3 device.
Function flow:
- a) : retrieve the first byte which is the frame size from the device
- b) : retrieve the required bytes
Normally an end user don't want to use these function as they are assumed as "low level functions".
- Parameters:
-
hDev is a handle to an openned knet socket (Khepera3:dsPic). out is a pointer to a buffer where the command frame will be stored on.
- Returns:
- A value:
- <0 on error (KH3_ERROR_FRMSZERR, KH3_ERROR_SZFMTERR)
- >=0 on success (returns should be the size of frame)
- Remarks:
- This function requires that kb_kh3_init has been called
Definition at line 87 of file kb_khepera3.c.
References KB_ERROR, KB_ERROR_KH3FRMSZERR, KB_ERROR_KH3SZFMTERR, KH3_ERROR_FRMSZ, KH3_ERROR_SZFMT, and knet_llread().
Referenced by kh3_ambiant_ir(), kh3_battery_voltage(), kh3_configure_os(), kh3_measure_us(), kh3_proximity_ir(), kh3_reset_tstamp(), and kh3_revision().

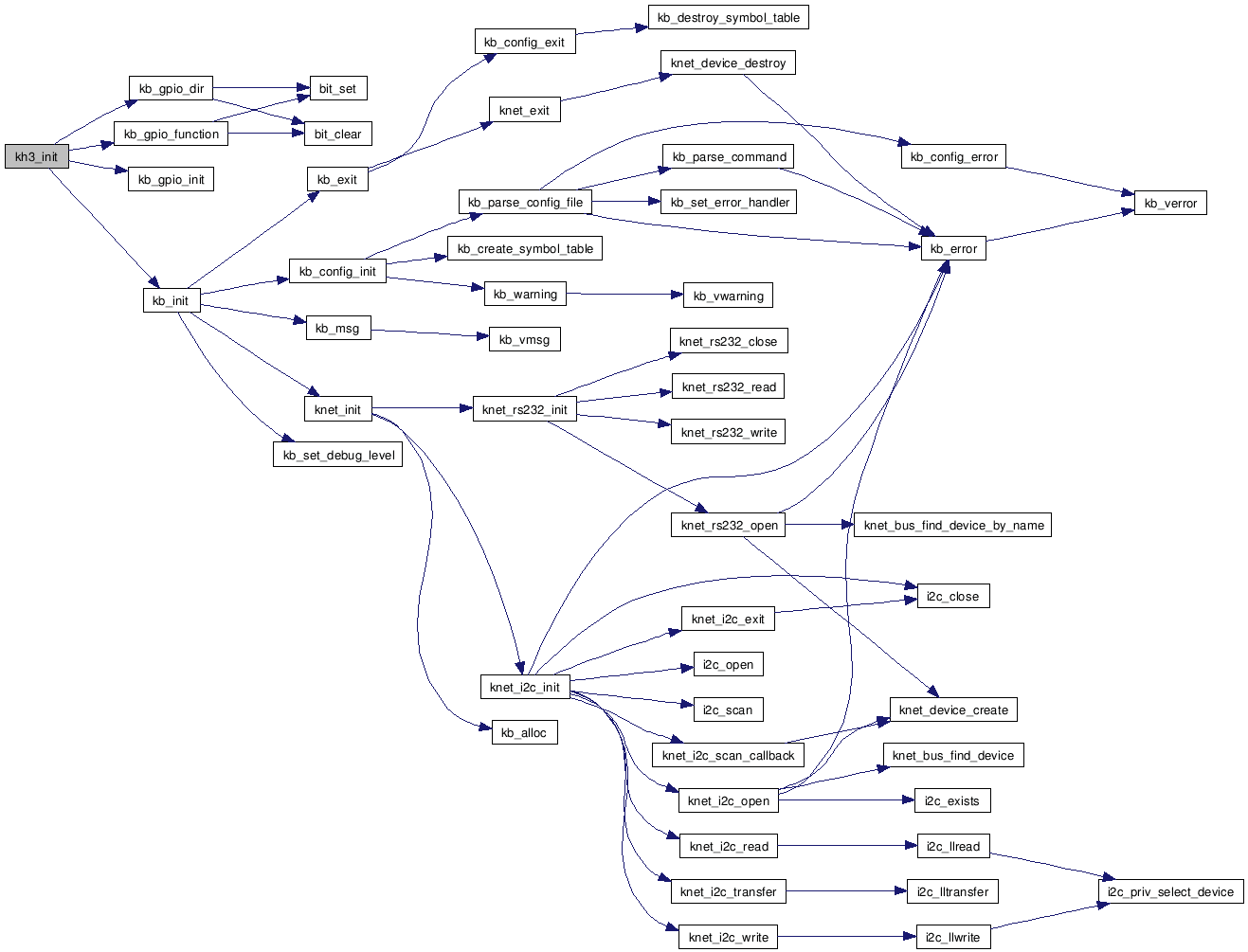
| int kh3_init | ( | void | ) |
-------------------------------------------------------------------- Prototypes Declaration
kh3_init initializes some things like the GPIO40 pin. This function needs to be called BEFORE any other functions.
- Parameters:
-
none
- Returns:
- A value:
- <0 on error
- 0 on success
Definition at line 38 of file kb_khepera3.c.
References IN, KB_ERROR, KB_ERROR_KH3KBINIT, kb_gpio_dir(), kb_gpio_function(), kb_gpio_init(), kb_init(), KH3_ERROR_KBINIT, and KNET_INT0.
Referenced by initKH3().
| int kh3_measure_us | ( | char * | outbuf, | |
| unsigned char | usnbr, | |||
| knet_dev_t * | hDev | |||
| ) |
kh3_measure_us retrieves measure from a given US transmitter.
- Parameters:
-
outbuf is a buffer where the data will be stored on. usnbr is a number of the us trx to read from ( 1 to 5 ). hDev is a handle to an openned knet socket (Khepera3:dsPic).
- Returns:
- NULL or a pointer to the ultrasonic measure
Definition at line 386 of file kb_khepera3.c.
References K3_CMD_DELAY, kb_gpio_get(), kh3_getcommand(), kh3_sendcommand(), and KNET_INT0.
Referenced by measureUS().

| int kh3_proximity_ir | ( | char * | outbuf, | |
| knet_dev_t * | hDev | |||
| ) |
kh3_proximity_ir retrieves an instant IR measure.
- Parameters:
-
outbuf is a buffer where the data will be stored on. hDev is a handle to an openned knet socket (Khepera3:dsPic).
- Returns:
- NULL or a pointer to the IR measure
Definition at line 153 of file kb_khepera3.c.
References K3_CMD_DELAY, kb_gpio_get(), kh3_getcommand(), kh3_sendcommand(), and KNET_INT0.
Referenced by braitenbergAvoidance(), main(), and proxIR().

| int kh3_reset_tstamp | ( | char * | outbuf, | |
| knet_dev_t * | hDev | |||
| ) |
kh3_reset_tstamp resets the absolute timestamp.
- Parameters:
-
outbuf is a buffer where the data will be stored on. in this case the only answer to expect is z, which is a ack. hDev is a handle to an openned knet socket (Khepera3:dsPic).
- Returns:
- NULL or a pointer to the ack.
Definition at line 262 of file kb_khepera3.c.
References K3_CMD_DELAY, kb_gpio_get(), kh3_getcommand(), kh3_sendcommand(), and KNET_INT0.
Referenced by tstampRST().

| int kh3_revision | ( | char * | outbuf, | |
| knet_dev_t * | hDev | |||
| ) |
kh3_revision retrieves the current OS version/revision
- Parameters:
-
outbuf is a buffer where the data will be stored on. hDev is a handle to an openned knet socket (Khepera3:dsPic).
- Returns:
- NULL or a pointer to the revision data
Definition at line 296 of file kb_khepera3.c.
References K3_CMD_DELAY, kb_gpio_get(), kh3_getcommand(), kh3_sendcommand(), and KNET_INT0.
Referenced by main(), and revisionOS().

| int kh3_sendcommand | ( | knet_dev_t * | hDev, | |
| unsigned char * | in | |||
| ) |
kh3_sendcommand sets a command frame to a given khepera3 device.
Normally and end user don't want to use these function as they are assumed as "low level functions".
- Parameters:
-
hDev is a handle to an openned knet socket (Khepera3:dsPic). in is a pointer to a buffer where the command frame to be sent is stored on.
- Returns:
- A value:
- <0 on error (KH3_ERROR_FRMSNDERR)
- >=0 on success (returns should be the size of frame)
- Remarks:
- This function requires that kb_kh3_init has been called
Definition at line 126 of file kb_khepera3.c.
References KB_ERROR, KB_ERROR_KH3FRMSNDERR, KH3_ERROR_FRMSND, and knet_llwrite().
Referenced by braitenbergAvoidance(), kh3_ambiant_ir(), kh3_battery_voltage(), kh3_configure_os(), kh3_measure_us(), kh3_proximity_ir(), kh3_reset_tstamp(), and kh3_revision().

